

0 引言
波浪滑翔机(wave glider, WG)是一种依靠波浪提供前进动力、太阳能等提供电力的新型海上无人驾驶航行器。在理想情况下,WG可在海洋环境下无限时巡航,并具有自主巡航、运行噪声小、抵抗风浪能力强、续航能力强等特点,其在海洋监测、军事侦查等领域有着良好的应用前景。
WG的特殊动力推进方式导致其航行速度和航行机动性对海洋状况及天气状况的依赖性较高。当遇到流大、浪小的海况时,WG会因波浪产生的动能不足而出现随流漂移的现象,还容易因动力不足导致波浪滑翔机无法保持预期的航向造成航迹紊乱等现象。目前WG主要依靠少量太阳能发电进行测量和方向控制,在阴雨天气下由于太阳能发电显著下降,会增加WG失去电力供应的风险。针对波浪滑翔机电力供应的不足之处,本文提出一种新型波浪能发电滑翔机(wave energy powered glider, WPG)设计方案,在自主巡航的同时利用波浪能进行发电并存储。介绍WPG的结构组成及工作原理,设计物理模型并展开水池实验,对其自主前进的同时利用波浪能对外做功的特性进行研究,以验证该设计方案的可行性。
1 结构组成及原理
WPG系统结构如图1所示,主要由水面浮体、能量转换系统(power take-off, PTO)、储能系统、推进器等组成。WPG与WG相比,增加了波浪能转换机构。
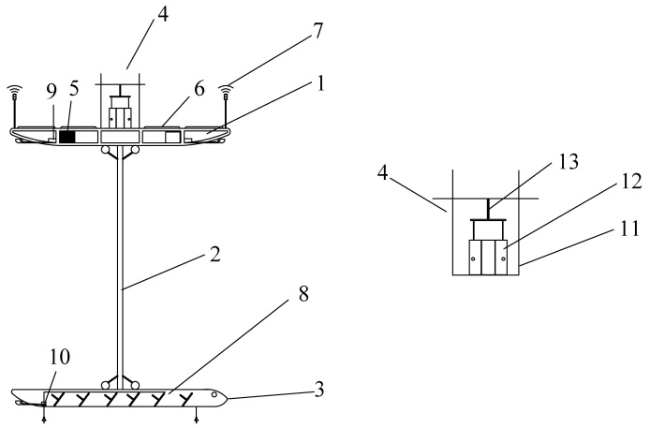
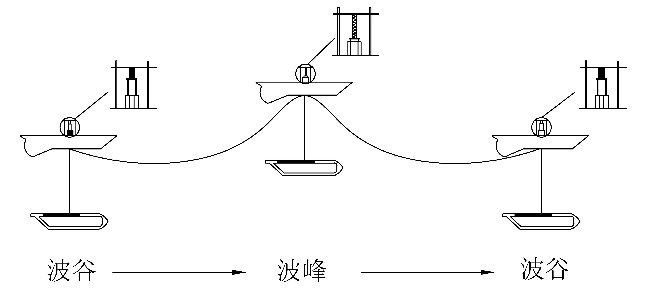
WPG工作原理如图2所示。水面浮体由波谷向上运动至波峰过程中,通过柔性缆绳牵引水下牵引机、翼板向上运动,柔性缆绳拉力增大,牵引直线往复式做功机构中的往复运动机构向下运动而发电,拉簧被拉长,弹性势能增加;当波谷来临时,水面浮体垂向运动与上述过程相反,柔性缆绳拉力减小,拉簧弹性势能释放牵引做功机构的往复运动机构向上运动而发电。往复式做功机构可为储能系统充电,进而为各个观测仪器供电。当波浪环境较差、WPG动力不足或需要加速前进时,储电系统可为推进器提供稳定电能,保证WPG稳定工作。
2 试验装置
2.1 试验模型
为开展WPG整体结构的运动响应及PTO工作性能研究,对WPG设计方案进行简化,简化了观测仪器、推进器、储能装置、太阳能板等部件。因双向气缸运动特性为沿内部导轨往复直线运动,与直线往复式做功机构的运动方式相同,因此试验中采用双向气缸作为WPG的直线往复式做功机构。
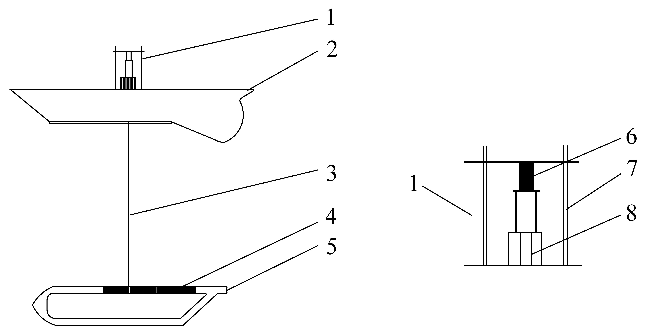
图3 波浪能发电滑翔机物理试验模型1—能量转换系统;2—水面浮体;3—柔性缆绳;4—翼板;5—水下牵引机;6—拉簧;7—固定支架;8—双向气缸。 Fig. 3 Wave energy powered glider physical test model |
表1 试验模型结构主要参数Table 1 Main parameters of test model structure |
| 参数 | 数值 |
|---|---|
| 水面浮体尺寸/cm | 84 × 24 × 10 |
| 水面浮体重量/kg | 2.23 |
| 水下牵引机尺寸/cm | 76 × 54 × 14 |
| 水下牵引机重量/kg | 5.08 |
| 柔性缆绳长度/cm | 60 |
| 翼板尺寸/cm | 24.0 × 6.4 |
| 固定支架尺寸/cm | 33 × 20 |
| 双向气缸行程/cm | 15 |
2.2 试验设计
物理模型试验在试验水槽中进行,水槽长54 m、宽1.2 m,深1.2 m,水深0.95 m,配备有一台推板式造波机和消波装置。造波机可输出波高为0.02 ~ 0.30 m、周期为0.4 ~ 4.0 s的规则波和不规则波。
试验物理模型如图4所示。模型安装有力传感器和位移传感器。力传感器两端分别连接拉簧与双向气缸活塞杆,用以测量活塞杆拉力参数,量程为0 ~ 500 N,采样频率为5 Hz;位移传感器固定于支架上,用以测量双向气缸活塞杆运动行程,量程为0 ~ 2 m,采样频率为5 Hz。

基于本课题组前期试验研究,根据造波机的造波能力和造波水池的条件,设计试验工况见表2。
表2 试验工况Table 2 The test working conditions |
| 变量 | 数值 |
|---|---|
| 波高/m | 0.17、0.18、0.19、0.20、0.21、0.22、 0.23、0.24、0.25、0.26、0.27 |
| 周期/s | 2.6、2.7、2.8 |
2.3 试验方法
波峰来临时拉簧蓄能,此阶段不计PTO做功,活塞杆受到的拉力以及位移均计为0;当波谷来临时拉簧弹性势能释放,牵引双向气缸活塞杆向上运动,此时一个时间步内力F为力传感器输出数据减去F0(F0为水下牵引机的重力减去浮力后的净重,受测量条件限制,此过程将水下牵引机的运动视为匀速运动),对应位移x为位移传感器相邻两个数据采集点活塞杆的行程差,定义活塞杆向下运动为正。PTO做功为:
${{W}_{i}}=\left\{ \begin{matrix} \left| \left( {{F}_{i}}-{{F}_{0}} \right)\left( {{x}_{i+1}}-{{x}_{i}} \right) \right| & {} & {{x}_{i+1}}-{{x}_{i}}<0 \\ 0 & {} & {{x}_{i+1}}-{{x}_{i}}\ge 0 \\\end{matrix} \right.$
${{W}_{total}}=\sum\limits_{i=1}^{i=350}{{{W}_{i}}}$
${{P}_{ins}}=\frac{{{W}_{i}}}{0.2}=5{{W}_{i}}$
${{P}_{average}}=\frac{{{W}_{total}}}{70}$
式中:Wi为第i个采集点PTO做功;Wtotal为PTO总功;Pins为PTO做功瞬时功率;Paverage为PTO做功平均功率;Fi为第i个采集点力传感器输出量;$\left( {{x}_{i+1}}-{{x}_{i}} \right)$为第i个采集点双向气缸行程;t为做功时间,本次实验t = 70 s。
2.4 误差分析
通过不确定度分析来确定实验参数误差范围,不确定度计算公式如下:
$\Delta Y=\sqrt{{{\sum\limits_{i=1}^{K}{\left( \frac{\partial Y}{\partial {{X}_{i}}}\Delta {{X}_{i}} \right)}}^{2}}}$
.式中:Y为性能参数;X为测量变量;K为样本数。
采用的力传感器的测量精度为 ±0.2%,位移传感器的测量精度为 ±3%,误差分布认定为均匀分布。根据不确定度分析结果可得,平均功率最大不确定度为6.89 mW,最小不确定度为1.36 mW,平均不确定度为3.79 mW,误差范围在2.5%以内,模型迎波前进平均速度的误差范围控制在0.8%以内,证明数据误差表现良好,受采集设备精度影响较小。
3 试验结果分析
3.1 波高对PTO做功以及WPG运动的影响
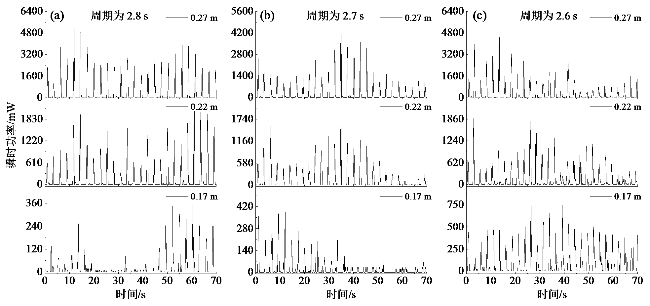
图5展示了不同规则波周期下双向气缸活塞杆所受拉力以及位移情况。
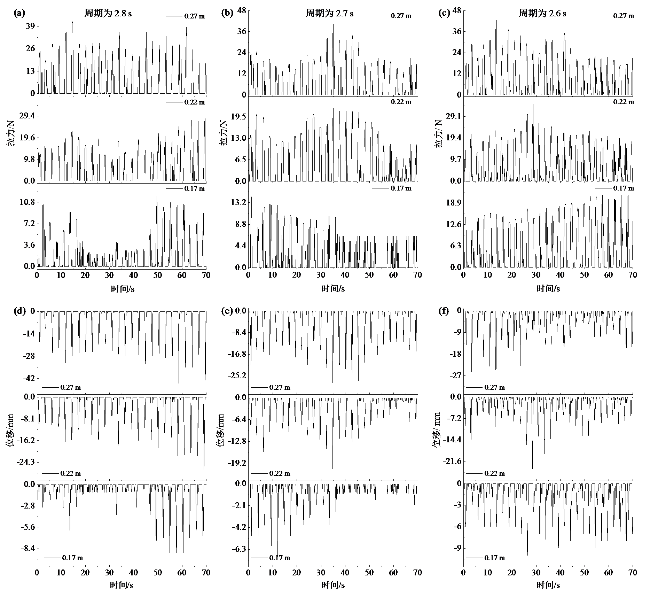
规则波周期不变时,PTO的做功功率随波高增大而变化。随着波高增大,活塞杆位移和拉力均呈现增长趋势。在周期为2.8 s的规则波下[图5(a、d)],当波高为0.17 m时,拉力与位移的最大值分别为11.9 N和9 mm;波高增大至0.27 m时,其最大值相应增大至41.8 N和45 mm。在周期为2.7 s的规则波下[图5(b、e)],波高0.17 m对应的拉力与位移最大值分别为14.7 N和7 mm,波高增至0.27 m时,最大值分别增大至40.4 N和28 mm。在周期为2.6 s的规则波下[图5(c、f)],波高为0.17 m时,拉力与位移的最大值分别为21.3 N和10 mm,波高增至0.27 m时,最大值分别增大至43.0 N和30 mm。
图6展示了不同周期下PTO瞬时功率曲线。PTO瞬时功率变化趋势与活塞杆位移及拉力一致,三者峰值同步出现。随着波高增大,瞬时功率峰值显著提高。在周期为2.8 s的规则波况下[图6(a)],波高从0.17 m增大至0.27 m时,PTO瞬时功率最大值从355.5 mW增大至5 456 mW。在周期为2.7 s的规则波况下[图6(b)],波高为0.17 m时,PTO瞬时功率最大值为444.5 mW,波高增大至0.27 m时,瞬时功率最大值达4 774.0 mW。周期为2.6 s的规则波况下[图6(c)],波高0.17 m对应的瞬时功率最大值为840.0 mW,波高增至0.27 m时,最大值增至5 459.0 mW。
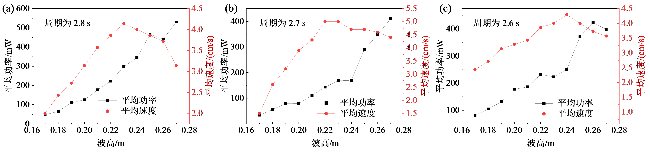
如图7(b)所示,在周期为2.7 s的规则波况下,PTO平均功率随着波高的增大呈现逐渐增大的趋势,波高为0.17 m时,PTO平均功率为34.1 mW,波高增大到0.27 m时,平均功率增大到410.7 mW。WPG迎波前进平均速度呈现先随波高增大而先增大后减小的趋势,波高为0.17 m时的平均速度为1.5 cm/s,波高增至0.22 m、0.23 m时的平均速度达到最大值5 cm/s,波高增加至0.27 m时平均速度减小至4.4 cm/s。
如图7(c)所示,随着瞬时功率的增大,PTO平均功率也呈现增大的趋势,只有波高为0.26 m时大于0.27 m下PTO的平均功率,波高为0.17 m时平均功率为81.1 mW,波高增大到0.27 m时平均功率增大到397.7 mW。WPG迎波前进速度变化趋势与其他周期下WPG迎波前进平均速度变化类似,呈现随波高增大先增大后减小的趋势。波高为0.17 m时平均速度为2.43 cm/s,在波高增大到0.24 m时平均速度达到最大值,为4.29 cm/s,之后随波高的增大逐渐减小,波高为0.27 m时平均速度减小至3.57 cm/s。
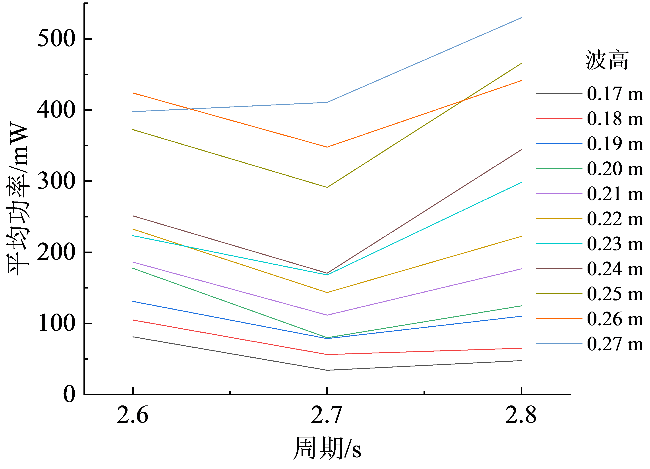
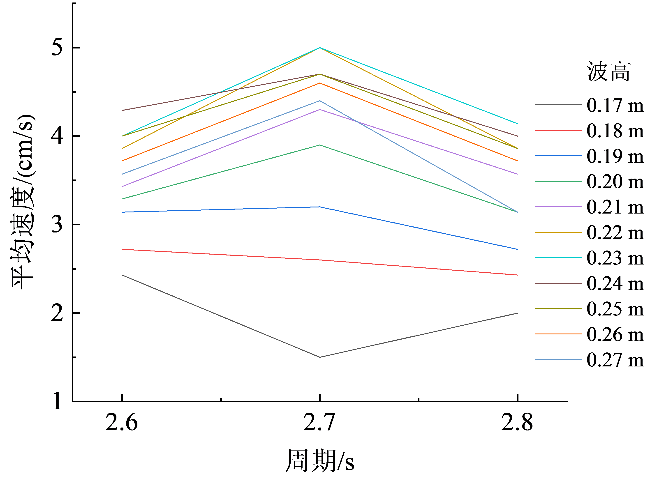
3.2 周期对PTO做功以及WPG运动的影响
4 结论
提出一种新型波浪能发电滑翔机设计方案,通过物理模型试验,证明该方案实现了波浪环境下自主巡航的同时将波浪能转换成电能。主要结论如下:
(1)随着波高的增大,双向气缸活塞杆所受拉力以及位移均呈现增大的趋势,PTO瞬时功率以及平均功率均呈现增大的趋势;WPG迎波前进平均速度呈现先增大后减小的趋势。随着周期的增大,PTO平均功率呈现先减小后增大的趋势;WPG迎浪前进平均速度呈现先增大后减小的趋势。
(2)WPG在试验工况范围内有最快前进速度,但在最快前进速度工况下PTO做功明显偏小;同样PTO做功最大试验工况下WPG迎浪前进速度明显偏小,WPG快速前进与大功率做功难以兼得。
波浪滑翔机和能量转换系统的结合研究虽处于初级阶段,但试验证明WPG可实现波浪滑翔机在自主前进的同时对外做功。后续将考虑优化试验方案、改善试验条件、增大WPG柔性缆绳长度等,在更大周期、波高范围下测试WPG的前进速度、做功功率等。随着技术的进步,在丰富的海洋波浪能资源条件下,WPG有望获得更多的波浪能电力用以供给传感器以及推进器。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}