

0 引言
2006年,研究学者们在MARINTEK水池对5 MW“Hywind”概念进行了模型试验,基于Hawc2与Simo/Reflex组合进行了时域耦合分析并与试验结果进行对比,发现机组控制策略会使整个系统产生负阻尼现象[3,4]。2007年,JONKMAN等[5]基于FAST软件对Barge型浮式风机进行了时域耦合分析,认为风载荷会增加纵摇运动和艏摇的不稳定。2010年,CERMELLI等[6]在伯克利分校对5 MW“WindFloat”概念进行了模型试验,并通过TimeFloat和FAST软件组合进行了耦合仿真,发现90°方向艏摇角最大,风载荷主要影响纵摇运动,对纵荡和横荡影响不大。2012年,KOO等[7]在荷兰MARIN水池进行了三种不同浮式风机基础模型试验,试验发现风载荷可以减小Semi和Spar二阶纵摇响应。
2014年,DE RIDDER等[8]在荷兰MARIN水池进行了Tri-floater模型试验,并在试验中首次使用远程变桨控制系统,结果表明应用桨距角控制后试验与仿真结果差距较大。HSU等[9]根据模型试验所得数据,使用FAST软件与OrcaFlex软件相结合,对浮式风电机组-系泊系统进行耦合分析,主要研究了极端工况锚链张力变化。2015年,SAUDER等[10]在MARINTEK水池进行了一种可以实时反馈模拟空气动力载荷的混合模型试验,数值模型和物理模型通过传感器、通信网络以及执行器进行实时数据交互,为弗劳德数与雷诺数不能同时相似提供了解决方案,但数据交互会有时间延迟。2017年,纽卡斯尔大学与上海交通大学联合提出一种改进推力相似方法,即采用调整风速和控制马达作为发电机来寻找风轮推力、风速与叶尖速比(tip speed ratio, TSR)之间的关系,认为这样的试验模拟更加接近风轮真实的状态[11]。2017年,CHEN等[12]基于两种不同设计的重构叶片对半潜型浮式风机运动响应、气动性能、塔架特性与锚链特性进行了对比研究,结果表明几何相似叶片和气动相似叶片虽然都可以满足基本动力特性要求,但是气动相似叶片力学性能更佳,对叶片质量要求很高,与原设计差异过大会带来整体响应的变化。2019年,陈嘉豪等[13]基于凯恩方法建立一种刚柔多体耦合分析浮式风电机组程序,并与试验进行了初步对比,发现静态结果误差较小。2020年,FONTANELLA等[14]在MARIN水池采用混合方法进行了浮式风机试验,该方法使用多个小风扇装置代替传统发电机组,这样不仅可以验证独立变桨等控制策略,还可以验证三维湍流风况。
以国内首台深远海浮式风电装备研制项目为依托,基于海装6.2 MW风电机组和半潜型风电平台开展水池模型试验,介绍具体试验设置和环境工况,重点对试验与数值仿真结果进行对比分析,以期为工程项目的实施提供参考。
1 试验与数值模型
1.1 试验模型
根据弗劳德数和雷诺数的定义,具体如式(1)
和式(2),从基本原理的角度出发,两者是无法同时满足的。由于满足弗劳德数相似之后,模型雷诺数会比原型雷诺数小很多。因此根据试验目的和浮式风机整体响应特点,本次水池试验模型主要满足弗劳德数相似来保证惯性力和重力相似。同时根据原型叶片气动性能进行低雷诺数翼型重构设计,保证推力相似和TSR相似,以实现整体载荷和风轮的旋转效应相似,相似准则如式(3)、式(4)所示。
$Fr=\frac{{{U}_{\text{s}}}}{\sqrt{g{{L}_{\text{s}}}}}=\frac{{{U}_{\text{m}}}}{\sqrt{g{{L}_{\text{m}}}}}$ (1)
$Re=\frac{{{L}_{\text{s}}}{{U}_{\text{s}}}}{{{\nu }_{\text{s}}}}=\frac{{{L}_{\text{m}}}{{U}_{\text{m}}}}{{{\nu }_{\text{m}}}}$ (2)
$\lambda =\frac{{{\omega }_{\text{s}}}{{R}_{\text{s}}}}{{{U}_{\text{s}}}}=\frac{{{\omega }_{\text{m}}}{{R}_{\text{m}}}}{{{U}_{\text{m}}}}$ (3)
${{C}_{T}}=\frac{{{T}_{\text{s}}}}{\frac{1}{2}{{\rho }_{\text{s}}}U_{\text{s}}^{2}{{A}_{\text{s}}}}=\frac{{{T}_{\text{m}}}}{\frac{1}{2}{{\rho }_{\text{m}}}U_{\text{m}}^{2}{{A}_{\text{m}}}}$. (4)
式中:Fr为弗劳德数;Re为雷诺数;$\lambda $为叶尖速比;${{C}_{T}}$为推力系数;U为风速;L为几何特征长度;ω为风轮转速;R为风轮半径;A为风轮面积;T为风轮推力;ρ为空气密度;g为重力加速度;ν 为流体运动黏度系数;下标$\text{s}$代表实际值,m代表模型值。
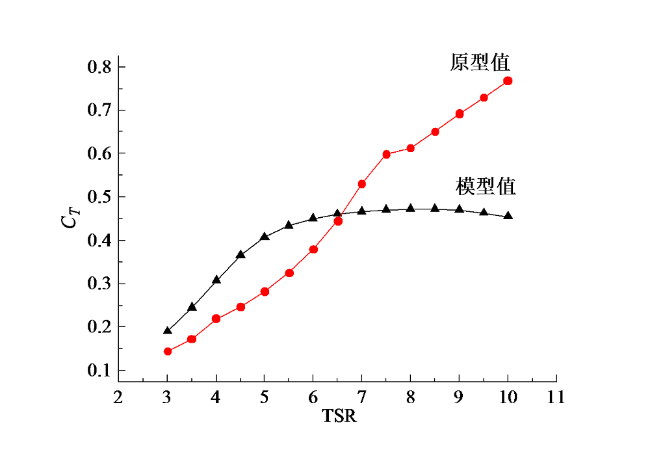
Fig. 1 Model blade aerodynamic thrust图1 重构叶片气动推力对比图 |
Table 1 Wind turbine model parameters表1 机组试验模型参数 |
| 参数 | 单位 | 原型值 | 模型值 | |
|---|---|---|---|---|
| 风轮直径 | m | 3.04 | 3.05 | |
| 轮毂高度 | m | 1.92 | 1.91 | |
| 额定转速 | r/min | 80.12 | 80.12 | |
| 机组总重量 | kg | 6.81 | 6.81 | |
Table 2 Platform model parameters表2 平台原型与试验模型参数 |
| 参数 | 单位 | 原型值 | 模型值 |
|---|---|---|---|
| 水深 | m | 1.300 | 1.295 |
| 吃水 | m | 0.360 | 0.361 |
| 平台总质量 | kg | 111.620 | 111.630 |
| 平台总重心高度 | m | 0.135 | 0.138 |
Table 3 Mooring system model parameters表3 系泊系统试验模型参数 |
| 参数 | 单位 | 原型值 | 模型值 |
|---|---|---|---|
| 锚链根数 | / | 9 | 9 |
| 锚链长度 | m | 8.62 | 8.61 |
| 最小破断强度 | kN | 99.04 | / |
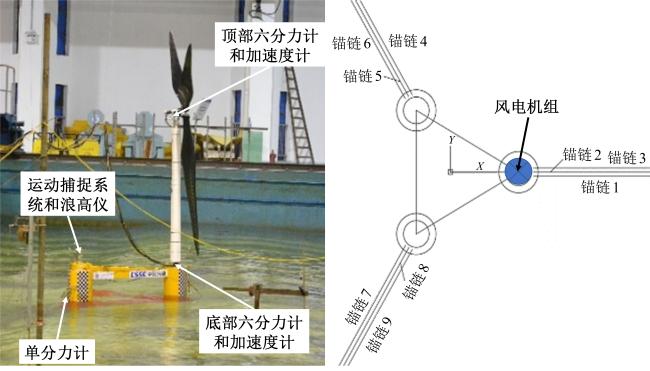
Fig. 2 Basin test model图2 水池试验模型 |
1.2 数值模型
浮式风机在气动载荷与水动载荷同时作用下非线性响应十分明显,加上控制系统,整个结构动力特性十分复杂,因此必须进行一体化仿真分析,结果才相对准确。本文数值仿真采用Deeplines Wind软件,该软件是在海洋工程领域使用多年的软件Deeplines基础上开发,已经过OC3-OC5项目验证。软件气动载荷计算为AeroDeep模块,其核心计算原理为叶素动量理论,即根据确定的各叶素翼型和空气动力参数,计算风轮在不同风速、转速、桨距角下的载荷和功率,采用迭代法计算空气动力载荷。实际的风场和气动载荷计算十分复杂,为保证计算非定常湍流风作用下载荷的精确性,对风电机组载荷计算时增加了叶尖损失修正、动态尾流与失速修正以及塔影效应修正。
水动力分析采用三维辐射/绕射方法。目前,针对大型浮体波浪载荷的计算主要是采用三维势流理论方法。该方法假定流体无黏、有势无旋、不可压缩,波浪载荷以惯性力和绕射力为主,黏性力相对较小。根据势流理论,在流域范围内的速度势满足Laplace方程:
${{\nabla }^{2}}\phi =0$ (5)
而速度势可以分解为绕射势和辐射势,表示如下:
$\phi ={{\phi }_{\text{R}}}+{{\phi }_{\text{D}}}={{\phi }_{\text{R}}}+{{\phi }_{0}}+{{\phi }_{7}}$ (6)
${{\phi }_{\text{R}}}=i\omega \sum{_{j=1-6}}{{\varepsilon }_{j}}{{\phi }_{j}}$ (7)
${{\phi }_{\text{D}}}={{\phi }_{0}}+{{\phi }_{7}}$ (8)
式中:$\phi $为总速度势;${{\phi }_{R}}$为辐射势;${{\phi }_{\text{D}}}$为散射势;$\omega $为波浪圆频率;${{\varepsilon }_{j}}$为物体六自由度运动幅值(刚体假定);${{\phi }_{j}}$为单位辐射势;${{\phi }_{0}}$为入射波速度势;${{\phi }_{7}}$为绕射势。
通过在物体湿表面分布源汇来确定流场速度势,采用Green函数求解上述边界条件得到总速度势,进而求得物体表面上的压强分布,积分即可得到物体上的总波浪力和力矩。系泊模型的求解包括静力求解和动力求解,其中静力求解一般采用准静态的悬链线模型,动力求解采用的方法为集中质量法。
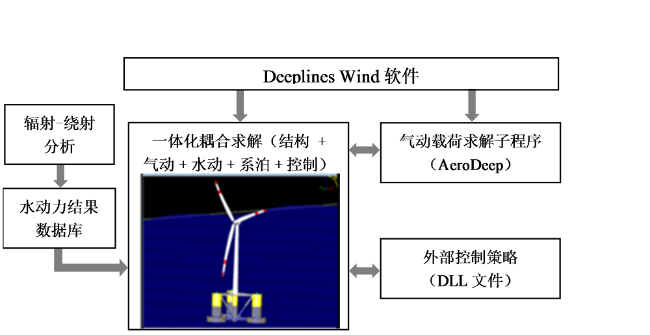
Fig. 3 Integrated analysis process图3 数值模型一体化仿真流程 |
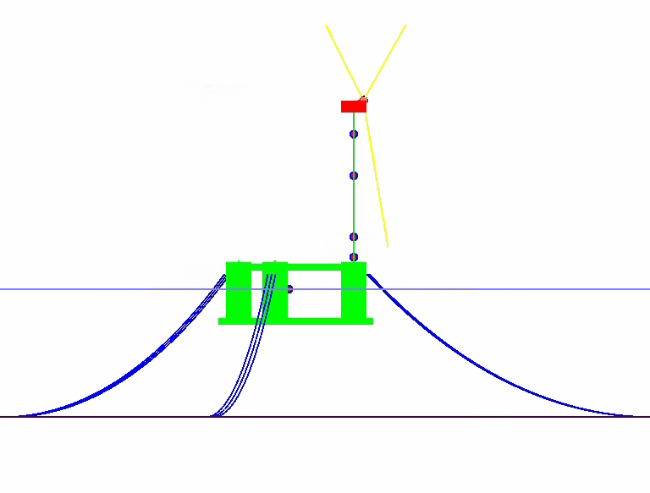
Fig. 4 Integrated simulation model图4 一体化仿真模型 |
2 试验设置与环境工况
2.1 试验设置与流程
Table 4 Sensor parameters表4 传感器参数 |
| 传感器名称 | 测量内容 | 通道数 | 安装位置 |
|---|---|---|---|
| 热线风速仪 | 风速 | 1 | 风场中间 |
| 浪高仪 | 波浪与气隙 | 4 | 水池和平台上 |
| 运动捕捉系统 | 六自由度运动 | 6 | 岸边和平台上 |
| 六分力计1 | 塔底载荷 | 6 | 塔筒底部 |
| 六分力计2 | 塔顶载荷 | 6 | 塔筒顶部 |
| 加速度计 | 机舱加速度 | 3 | 机舱底部 |
| 单分力计 | 锚链张力 | 9 | 锚链顶部 |
根据浮式风机动力响应特点、试验目的与原理,本次试验测量的参数包括装备六自由度运动、锚链顶部张力、塔底载荷、塔顶载荷、平台气隙、机舱加速度以及各工况下风浪流等环境条件,整个试验流程如图5所示。
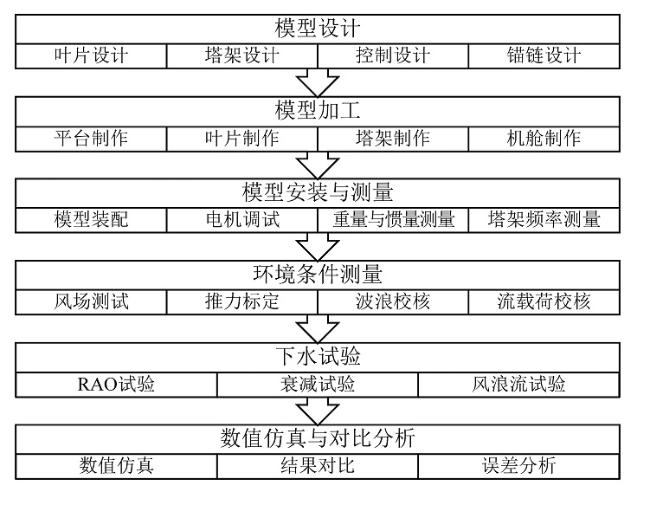
Fig. 5 Tank test process图5 水池试验流程图 |
2.2 试验模型与数值模型差异
Table 5 Results comparison of tank test and simulation表5 水池试验与仿真模型典型结果对比表 |
| 自由度 | 仿真值 | 试验值 | 临界阻尼比 |
|---|---|---|---|
| 完整系泊纵荡 | 61.4 s | 60.1 s | 1.27% |
| 完整系泊垂荡 | 23.5 s | 23.8 s | 1.30% |
| 完整系泊纵摇 | 23.2 s | 22.3 s | 1.25% |
| 完整系泊艏摇 | 63.2 s | 60.9 s | 1.10% |
| 塔底固定一阶前后 | 0.401 Hz | 0.372 Hz | / |
| 塔筒固定一阶左右 | 0.395 Hz | 0.388 Hz | / |
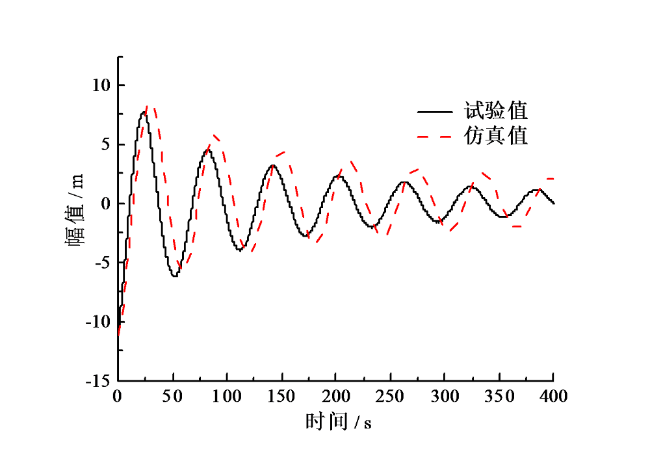
Fig. 6 Surge decay with all mooring图6 系泊完整状态纵荡衰减时历 |
试验与仿真固有周期差异的原因,一方面是水池中衰减试验时,风轮在运动过程中与空气产生相对运动,有气动阻尼,而在仿真中没有;另一方面是水池中衰减试验属于人为操作,每个自由度做衰减试验时,不能保证平台单一方向运动。
2.3 环境工况
Table 6 Typical load cases parameters表6 典型试验工况参数 |
| 工况 | 10 min平均风速 / (m/s) | 有义波高 / m | 谱峰周期 / s | 谱峰因子r | 流速 / (m/s) | 方向 / ° |
|---|---|---|---|---|---|---|
| 单纯风X1 | 11.8 | / | / | / | / | 0 |
| 单纯浪Y3 | / | 3.92 | 10.1 | 1.0 | / | 90 |
| 风浪联合Z3 | 11.8 | 3.92 | 10.1 | 1.0 | / | 90 |
| 正常发电U12 | 11.8 | 3.92 | 10.1 | 1.0 | 2.5 | 180 |
| 正常发电U13 | 25.0 | 3.92 | 10.1 | 1.0 | 2.5 | 0 |
| 极端空转W12 | 51.8 | 5.62 | 15.0 | 3.3 | 3.5 | 180 |
3 结果对比分析
根据表6环境工况参数进行试验和数值仿真,从而得到浮式风机整体运动响应、锚链张力、塔筒载荷以及机舱加速度等关键结果,对比分析如下。
3.1 运动响应
提取各工况下浮式风机试验和仿真模型运动响应统计结果,进行对比和频谱分析,代表分析结果如图7 ~ 图10所示。项目数据采用 (幅值-均值)/(最大值-最小值) 的归一化方法进行处理。从分析结果可以看出,各工况试验值和仿真值统计结果较为接近,正常发电工况最大纵荡幅值接近13 m。仿真结果幅值要比试验结果偏大,这在后面的频谱分析中也可以体现,其原因在于仿真模型阻尼偏小。通过图9可以看出,浮式风机在正常海况下纵荡或横荡响应能量主要分布在低频与波频段,低频响应更为突出。风浪联合状态低频响应能量分布要比单纯波浪状态响应小,说明气动阻尼对共振响应起到了抑制作用,同时风载荷会一定程度降低浮式风电装备低频运动标准差。通过图10可以看出,横摇运动在横荡固有周期和自身固有周期附近能量均较大,说明横摇与横荡运动之间具有明显的耦合效应。
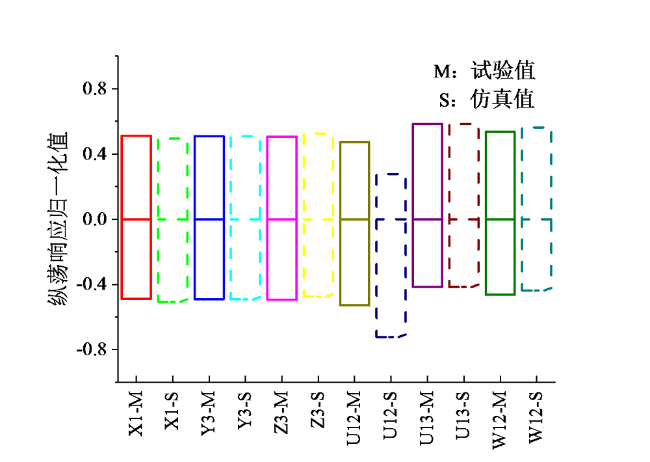
Fig. 7 Surge response uniformization comparison图7 纵荡响应结果归一化对比 |
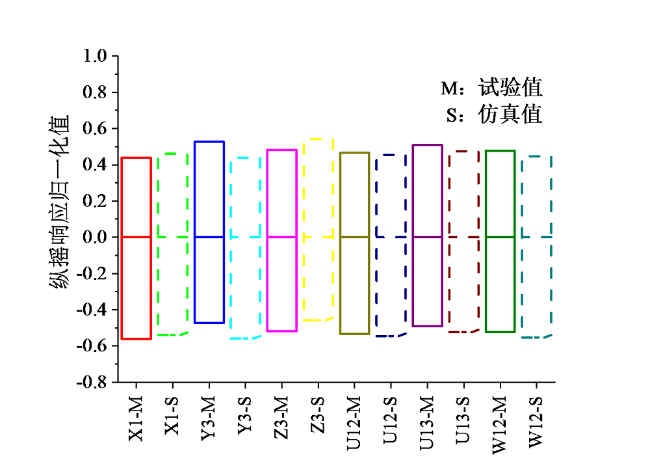
Fig. 8 Pitch response uniformization comparison图8 纵摇响应结果归一化对比 |
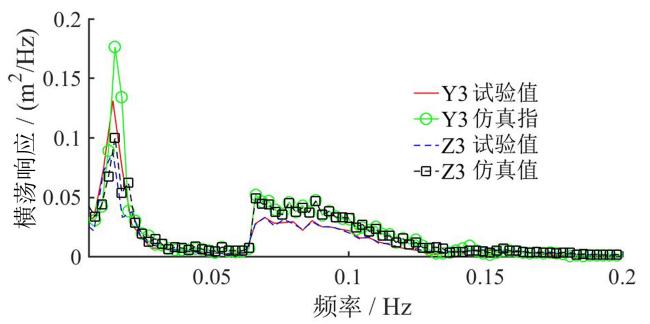
Fig. 9 Surge response spectral analysis图9 横荡响应频谱分析(90°) |
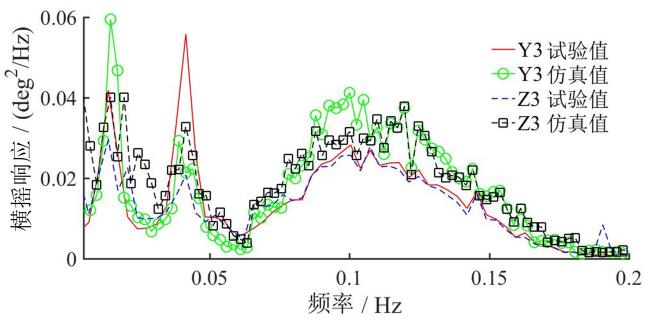
Fig. 10 Roll response spectral analysis图10 横摇响应频谱分析(90°) |
3.2 锚链张力
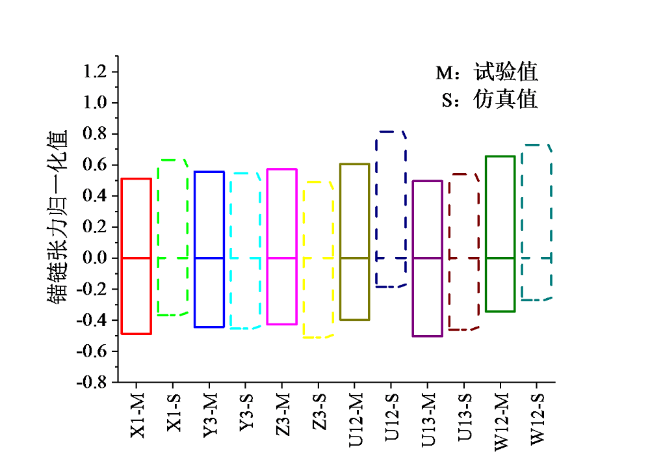
Fig. 11 Mooring tension uniformization comparison图11 锚链张力结果归一化对比 |
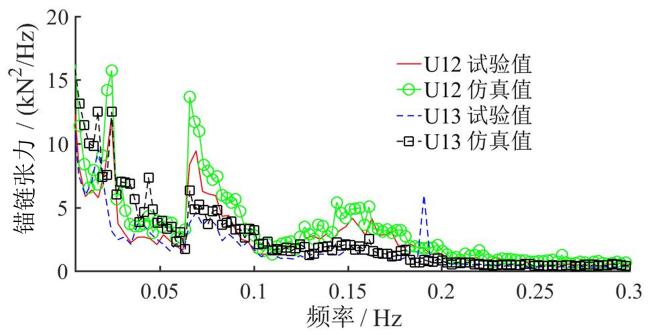
Fig. 12 Mooring tension spectral analysis图12 锚链张力频谱分析 |
3.3 塔架载荷
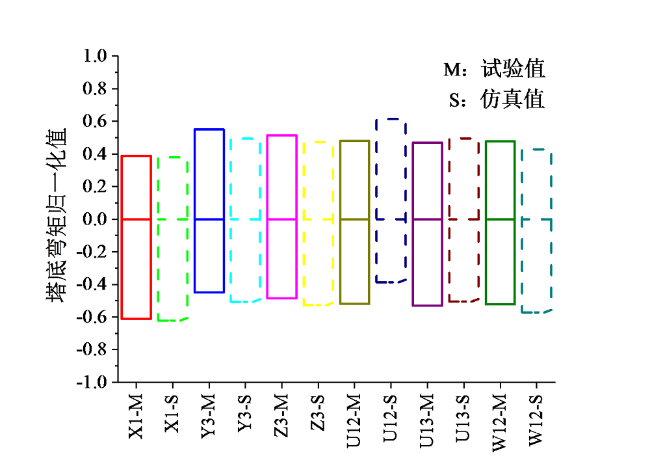
Fig. 13 Tower bottom bending moment uniformization comparison图13 塔底弯矩结果归一化对比 |
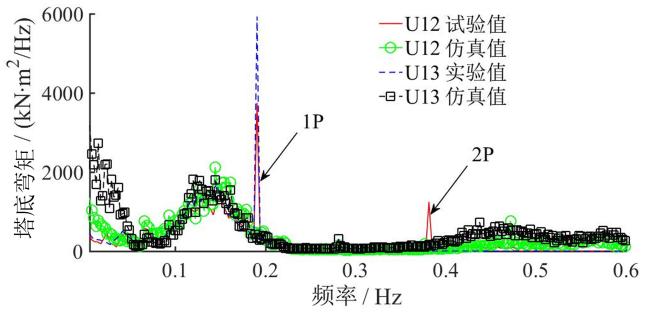
Fig. 14 Tower bottom bending moment spectral analysis图14 塔底弯矩频谱分析 |
3.4 机舱加速度
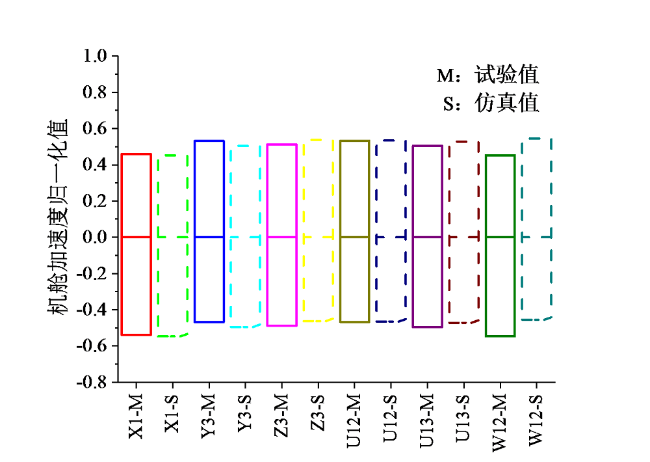
Fig. 15 Nacelle acceleration uniformization comparison图15 机舱加速度结果归一化对比 |
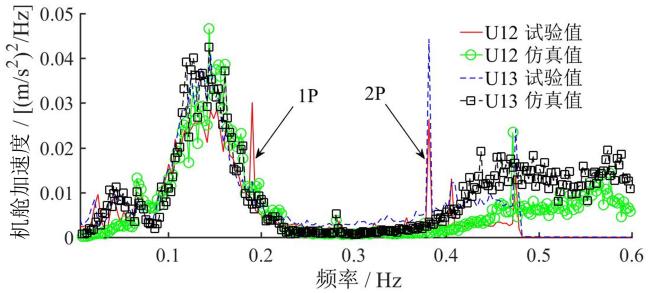
Fig. 16 Nacelle acceleration spectral analysis图16 机舱加速度频谱分析 |
4 结论
基于海装浮式风机参数完成水池模型试验和一体化仿真分析,并选择整体运动响应、锚链张力、塔筒载荷以及机舱加速度等关键结果进行对比分析,从而验证试验模型与仿真模型的一致性,得到以下结论。
(1)各工况试验值和仿真值统计结果较为接近,说明采用推力相似和弗劳德数相似的水池试验方法可以满足验证浮式风机仿真模型的准确性,但是模型叶片设计与风场质量的好坏对试验结果影响很大。推力和风速湍流太大,会对整体动力响应产生影响。
(2)半潜型浮式风机低频运动响应明显,风浪联合状态低频响应能量分布要比单纯波浪状态响应小,说明气动阻尼对共振响应起到了抑制作用。而且横荡运动与横摇运动方向上具有较强的耦合现象。锚链张力在低频段和运动响应固有周期处能量较大,但随着波浪能量的加大,波频成分有所增加。
(3)塔筒载荷试验和仿真均值偏差较小,幅值有一定偏差,误差主要由塔筒动力特性和风轮不平衡造成。从频谱分析结果可以看出,塔筒载荷能量主要位于低频段、波频段和风轮1P频率处,其中低频区主要受风载荷控制,波频区主要受波浪控制。试验和仿真模型机舱水平方向加速度一致性较好,频谱分布与塔筒载荷相似。
(4)通过本次试验与数值对比发现,采用重构叶片和推力相似的方法,对简单工况尚可模拟,但对湍流风、风机控制动作以及故障状态等工况模拟缺陷较大,后续研究可结合风洞试验、半实物模型试验做进一步对比分析。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}