

0 引言
近年来,由于能源需求的不断增加和全球温室气体排放的严重影响,可再生能源逐渐成为全球范围内的关注焦点[1]。相比于传统的太阳能发电系统,漂浮式光伏在水体表面悬浮,可以有效利用水域空间,且可以通过水的散热作用提高电池组的效率,同时具有节能减排、环保等多重优势[2-3]。然而,漂浮式光伏的运行受到环境条件的影响,较大的风荷载、浪高、水流速度都可能导致光伏组件与浮体的破损或失效[4-5]。半潜式设计可以减少系统在风浪较大时的晃动,提高系统的稳定性[6]。此外,半潜式结构通过减少光伏板的摇晃可以使光伏板尽量保持在最佳光照角度,进而提高发电效率[7]。因此,半潜式浮体作为一种新型的光伏发电技术,应用前景广阔,同时也具有很高的研究价值。
目前有不少学者研究了漂浮式平台的水动力特性。LEE等[8]通过数值模拟分析了浮式光伏系统的结构鲁棒性,结果表明,最大波载在浮式光伏基础结构前后侧,而最小波载在基础结构转角位置处。乐丛欢等[9]通过频域法研究浮式平台的水动力特性,发现在风浪条件一定的情况下,流速增大将使浮式风机的最大纵荡响应和锚链拉力显著增大,但对纵摇和艏摇响应有一定程度的抑制作用。CHOI等[10]采用计算流体动力学和水力动力学对浮式光伏系统的风和波负荷进行了模拟,根据结果提出了提高浮式光伏系统安全性和经济性的设计策略,如在浮式光伏系统的边缘安装挡风玻璃。张大朋等[11]结合不同海况条件下的环境参数建立了某单点系泊浮标系统的水动力模型,通过模拟仿真得到了深海单点系泊方式气象浮标水动力响应特征并对该系统进行了参数敏感性水动力分析。
然而目前对于漂浮式光伏的半潜式浮式平台的单点系泊的水动力特性研究还较少。本文通过数值模拟探究浮式平台受到不同水动力条件的响应特性,旨在对半潜式漂浮式光伏系统的水动力特性进行研究,为其进一步优化设计和实际应用提供理论支持和实践指导。
1 模型建立
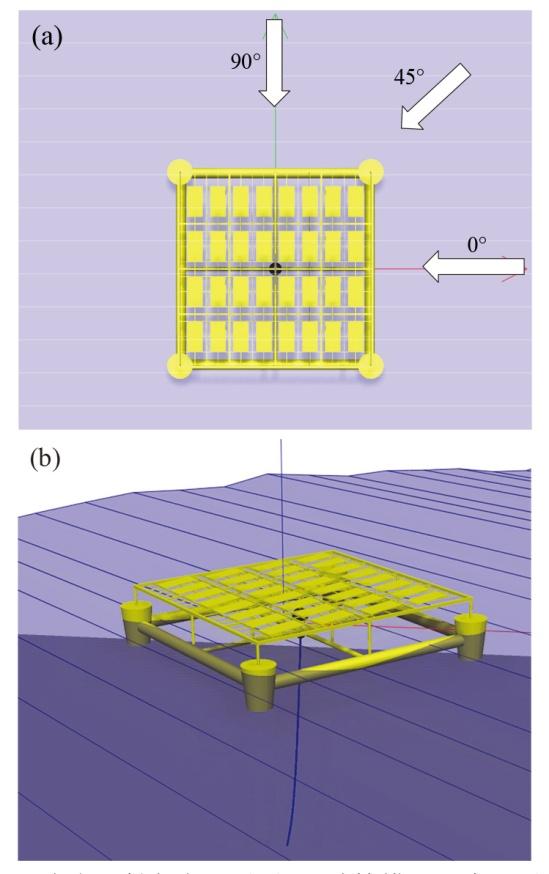
针对某半潜式漂浮式光伏基础结构的上部平台进行研究。该半潜式光伏基础结构由山东电力工程咨询院有限公司和天津大学丁红岩教授团队联合自主设计并已投入运行,位于山东省南黄岛东南部,实际结构采用悬链线式四点系泊,如图1所示。该平台边长为15 m,浮筒高度2.5 m,光伏板距离浮筒底部4.5 m。

建立该半潜式漂浮式光伏结构的模型并通过Sesam软件进行计算。假设其他三根锚链处于断裂状态,研究单点系泊下结构的水动力特性。其中锚链的系泊位置位于半潜平台十字框架中心位置处。
外框与内部浮体单元的实体模型在Genie软件中建立,导出结构的T1面元模型和T3质量模型,并在Hydrod软件中进行水动力参数计算。如图2所示,波浪入射角为0° ~ 90°,波浪频率覆盖0.05 ~ 5 rad/s,步长为0.05 rad/s,将浮体单元与外框计算所得的G1.SIF文件导入SIMO软件中,建立系泊缆模型,并设置波浪条件进行计算。
湿表面模型是计算波浪载荷的基础,网格大小通常由波长决定,小于所有分析波中最小波长的1/8[12]。波浪周长公式为:
$\lambda=\frac{g T^{2}}{2 \pi}$
式中:λ为波长,m;g为重力加速度,m/s2;T为波浪周期,s。
根据公式(1),可取1.0 m作为湿表面模型的网格尺寸。如图3所示,在线型变化显著的位置,网格应适当加密;网格尺寸不必与结构模型网格尺寸一致。
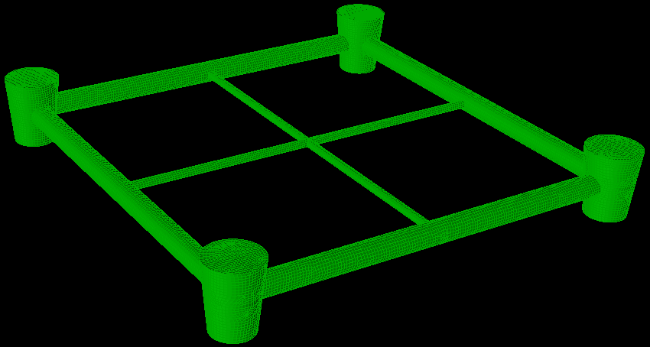
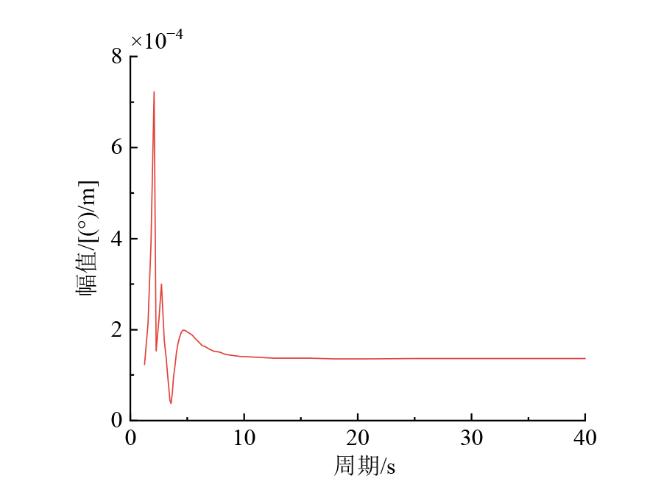
图4为半潜式结构的横摇幅值响应算子(response amplitude operator, RAO)计算结果。分析可知,结构的运动响应主要集中在短周期波浪范围内。结构横摇固有周期约为2.1 s,随着周期变大,横摇响应幅值急速减小。
初步计算得出,系泊缆长度为18 m时,所有结构的垂荡运动均在水面以下;以水位线作为垂荡运动的零点,最小值达到 −2.39 m,光伏板有上浪的风险;且系泊力较大,最大值为212.0 t。系泊缆长30 m时,结构的横荡和纵荡位移增大,即随着系泊缆长的增加,结构的运动范围增加。结构的垂荡幅值出现大于零的情况,但是最小值相差不大。结构横摇、纵摇有所减小,系泊力有明显的下降,最大值为7.36 t。
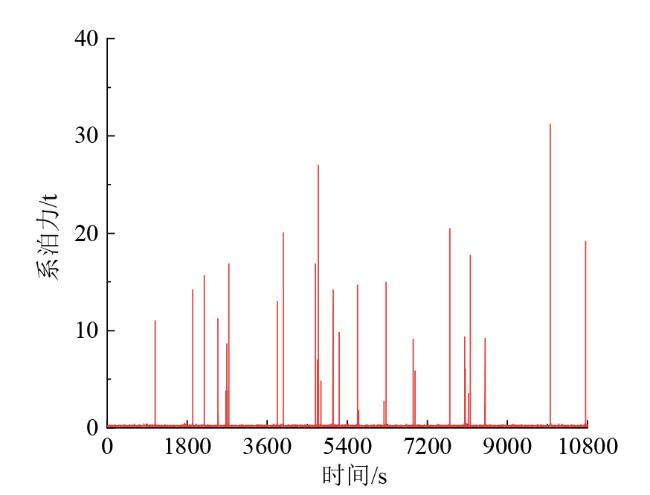
因此,对于单点系泊,综合考虑成本、结构运动范围、系泊力以及结构强度等方面因素,应当选择长度在20 ~ 30 m的锚链系泊方式。基于此,选择长度为25 m,直径为0.04 m的系泊链进行计算。需要注意的是,锚缆的弹性模量目前选用的是钢丝绳的弹模进行定性分析,为使结果更加准确,需要结合锚链实际参数进行计算。
图5为3 h计算所得的系泊力时程曲线,系泊力最大值为31.20 t。可以看出,较大的系泊力主要是由于短时间的冲击荷载所造成。
2 水动力计算结果
2.1 不同有义波高工况
为研究不同的波浪高度对漂浮式光伏基础结构整体运动性能的影响,设置了五种不同的工况,波浪高度分别为0.5、1.0、1.5、2.0、2.5 m,五种工况对应的周期均为8 s,波浪谱选取Jonswap谱,波浪入射角为45°。
图6为基础结构在不同波浪工况下的横荡和纵荡运动时程曲线,结构的横荡和纵荡受波高的影响规律较为明显,随着波高的增大,结构的横荡与纵荡运动幅值呈现增加的趋势。当波高为0.5 m时,结构的横荡幅值为1.03 m,纵荡值为1.16 m;当波高为2.5 m时,结构的横荡幅值为11.97 m,纵荡值为18.10 m。0.5 m和2.5 m波高的横荡运动幅值差异为10.94 m,纵荡幅值差异为16.90 m,差异较大;说明波高对结构的运动响应的影响较大,且对纵荡运动的作用更明显。
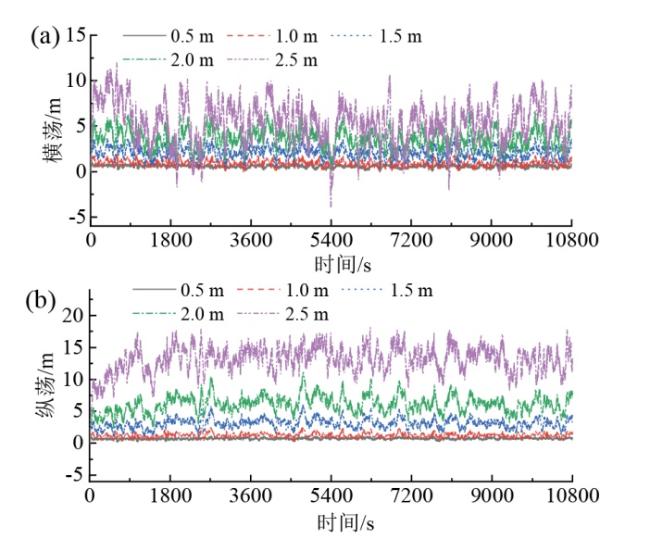
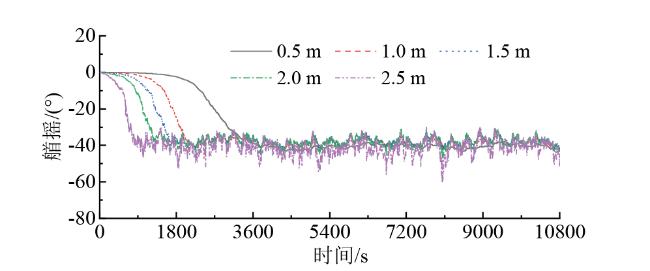
图7为半潜式平台在波浪作用下的艏摇运动时程曲线。由图可知,结构的艏摇运动随着波高的变化呈现的规律较为一致,即在45°的入射波浪作用下,结构最终会旋转至顺浪方向。但对于波高较大的海况,结构在旋转之后仍然会在平衡位置具有一个较大的艏摇角度,波高为0.5 m时,平衡后的艏摇角度为43.51°,波高为3.0 m时,平衡后的艏摇角度最大值为 −60.73°。波高较小时,结构旋转至平衡位置的速度较小,而波高较大时,结构能够迅速旋转为顺浪方向。说明结构会根据不同波高进行不同速度的运动响应。
2.2 不同谱峰周期工况
为研究波浪周期对漂浮式光伏基础结构运动响应的影响,设置了四种不同的波浪工况,其中波高均为3.0 m,波浪入射角均为45°,波浪谱峰周期分别为4、6、8、10 s。
图8为不同波浪周期工况下的结构横荡和纵荡运动时程曲线,结构的横荡及纵荡运动规律受波浪周期的影响较为明显,当周期为4、6、8、10 s时,结构的横荡幅值分别为16.07、12.68、11.09、5.53 m;纵荡幅值分别为18.30、18.29、17.96、9.15 m。即结构在相同的波高环境中,短周期波浪下的运动响应明显大于长周期波浪;这是由于结构的横摇和纵摇固有周期均较短,为2.1 s左右,故随着周期增长,结构的横荡与纵荡响应均减小。这与前文中的横摇RAO的规律保持一致。波浪周期从4 s延长至10 s,横荡幅值增大了10.54 m,纵荡幅值增大了9.15 m;说明波浪周期对结构运动响应的影响较大,且对横荡运动的影响更为明显。
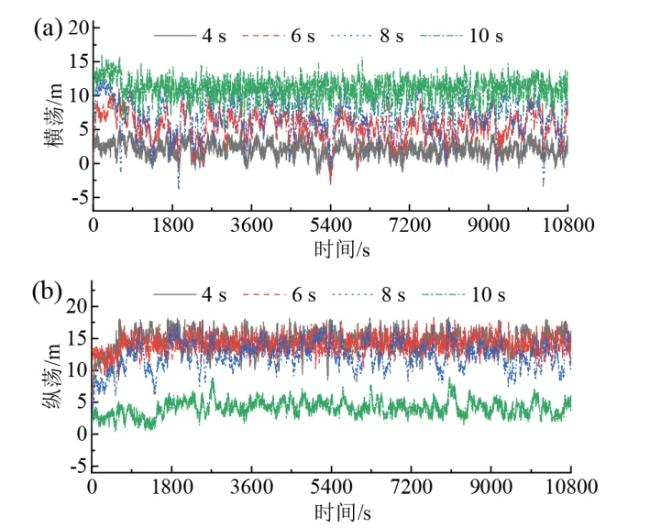
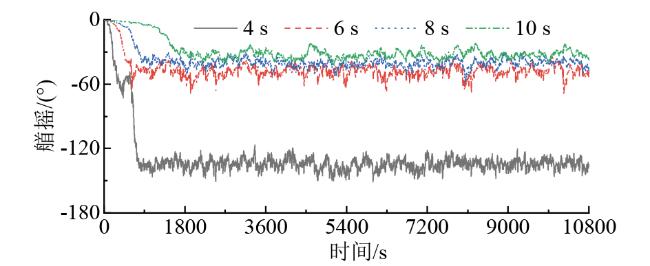
图9为基础结构在波浪作用下的艏摇运动时程曲线,结构的艏摇运动变化规律随波浪周期变化较为明显,在波浪作用下,结构艏摇运动趋向于使结构达到顺浪运动的效果,在短周期波浪作用下,结构艏摇较为剧烈,当周期为4、6、8、10 s时,结构艏摇幅值分别为151.00°、69.87°、59.47°、43.11°。周期为4 s和10 s时,结构艏摇相差了17.90°,差异非常显著,说明结构的艏摇运动受到波浪周期变化的影响非常大。
2.3 不同波浪入射角工况
为研究波浪入射角对漂浮式基础结构的影响规律,设计了五种不同的波浪入射角工况,入射角分别为0°、30°、45°、60°、90°,与之对应的波高与周期分别为3.0 m和8 s,波浪谱选用Jonswap谱,计算时长为3 h。由于结构中心对称,横荡与纵荡类似,横摇与纵摇也类似,故水平方向只研究横荡和横摇。
图10为不同波浪入射角下结构的横荡及垂荡时程曲线,对于单点系泊而言,波浪入射角对结构横荡以及纵荡影响较大,在0° 波浪入射角下,结构横荡运动相对较大,而波浪入射角为90° 时结构的垂荡运动相对较大,当波浪入射角为0°、30°、45°、60°、90° 时,结构的横荡幅值分别为15.83、17.50、11.09、6.34、0.07 m。波浪入射角从0° 变化至90° 时,结构横荡运动的幅值相差15.77 m,说明波浪入射角方向的变化对横荡的影响非常明显。
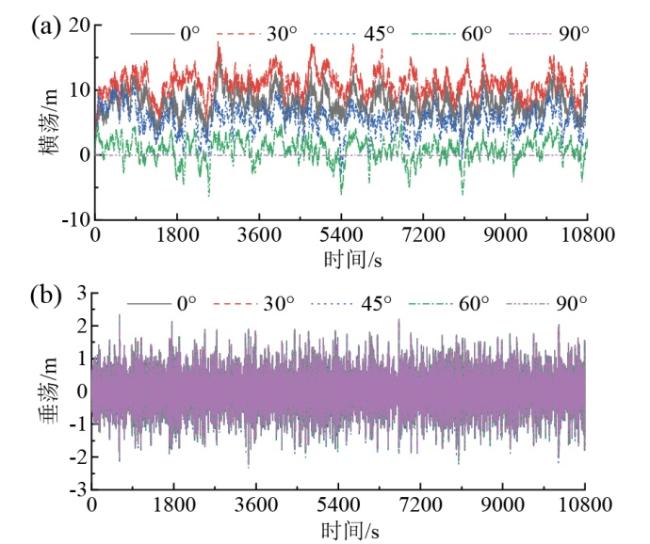
由图10(b)可知,改变波浪的入射角,垂荡运动的变化非常小,说明波浪入射角对结构垂荡响应影响较小,可见结构的垂荡位移主要受波高以及周期的影响较大。
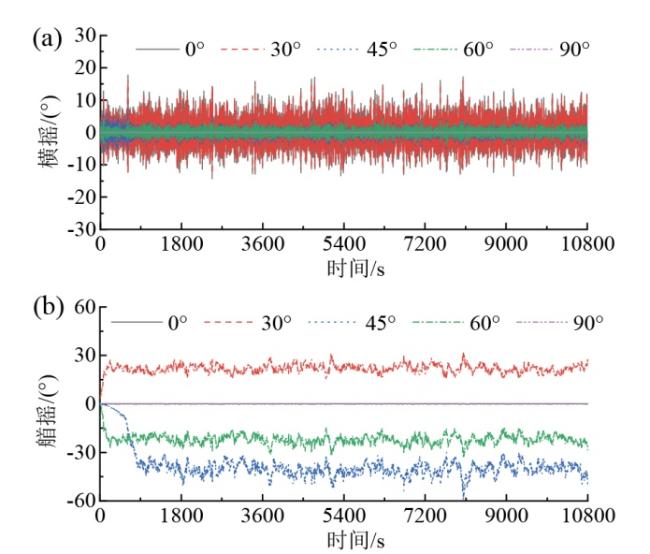
由图11(a)可知,当波浪周期不变时,结构的横摇和纵摇运动响应变化幅度基本一致,故只研究横摇。对于结构的横摇而言,波浪入射角影响较大。波浪入射角为90° 时幅值最小,结构几乎没有横摇运动;波浪入射角为0° 时幅值最大,最大值为17.70°。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
由图11(b)可知,结构艏摇受波浪影响较大,当波浪入射角为0° 和90° 时,结构的艏摇值不变,其原因为在该方向的入射波浪作用下,结构本身即处于顺浪方向,而在30°、45°、60° 方向的入射波作用下,结构会旋转相应的角度以达到顺浪运动的效果。相比之下,结构在30° 和60° 的波浪入射角作用下时程曲线相似,方向相反,说明结构在这两种情况下反方向旋转。在45° 波浪入射角作用下,结构的艏摇幅度最大,且顺浪旋转的速度最慢;说明了45° 为工程中最危险的波浪入射角方向。
3 结论
通过Sesam软件建模计算,研究了漂浮式光伏半潜式浮式平台的单点系泊的水动力特性,主要结论如下:
(1)随着波高的增大,结构的横荡与纵荡运动幅值呈现增加的趋势。
(2)结构固有周期与波浪周期越接近,则运动响应越明显。
(3)在不同入射波作用下,结构会旋转相应的角度以达到顺浪运动的效果。